Jingyao Ren
I am a robotics researcher and startup founder. I received my Ph.D. in Computer Science from University of Southern California in 2024, where I was advised by Nora Ayanian and Sven Koenig. Before that, I received my M.Eng. in Electrical and Computer Engineering from Cornell University, and my B.Eng. from Sun Yat-Sen University. I have broad research interests in robotics and artificial intelligence, especially in helping large teams of robots plan, coordinate, and adapt in complex environments. [My CV]
Research Interests
During my Ph.D., I studied the Multi-Agent Path Finding (MAPF) problem,where multiple robots must plan collision-free paths to their goals.
My research focused on empirical hardness: why some MAPF instances are much harder than others, how map topology and agent distribution shape difficulty, and how these insights can improve algorithms, benchmarks, and test environments.
Selected Projects
I am broadly interested in robotics and AI systems that combine visual coolness with real-world motion. My past projects span from hacking drones, robot arms to multi-robot system.
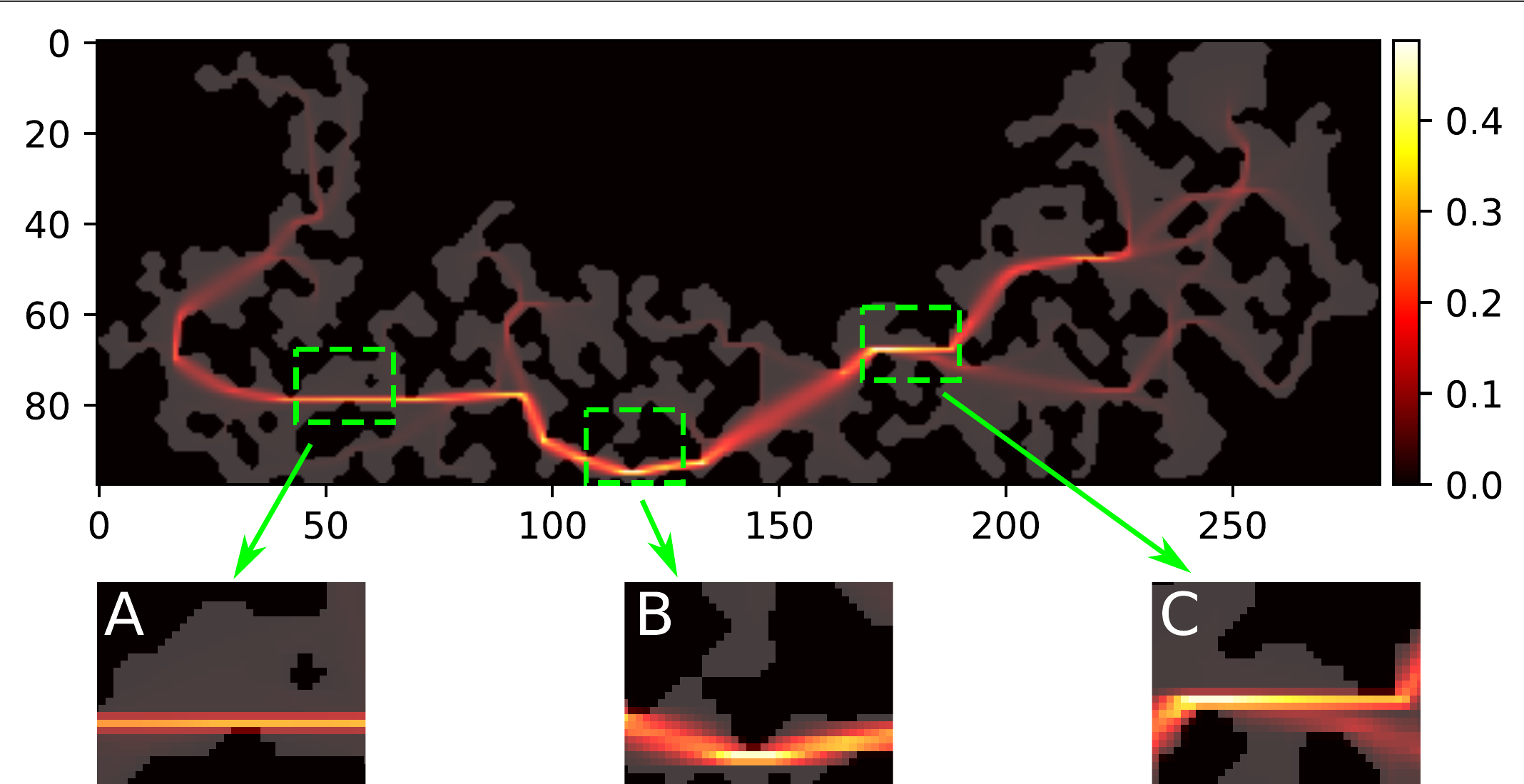
Controlled-Connectivity Map Generation
Generating grid maps with controlled graph features such as connectivity.
Selected Publications
Empirical Hardness in Multi-Agent Pathfinding: Research Challenges and Opportunities
Multi-agent pathfinding (MAPF) is the problem of finding collision-free paths for a team of agents on a map. Although MAPF is NP-hard, the hardness of solving individual instances varies significantly, revealing a gap between theoretical complexity and actual hardness. This paper outlines three key research challenges in MAPF empirical hardness to understand such phenomena. The first challenge, known as algorithm selection, is determining the best-performing algorithms for a given instance. The second challenge is understanding the key instance features that affect MAPF empirical hardness, such as structural properties like phase transition and backbone/backdoor. The third challenge is how to leverage our knowledge of MAPF empirical hardness to effectively generate hard MAPF instances or diverse benchmark datasets. This work establishes a foundation for future empirical hardness research and encourages deeper investigation into these promising and underexplored areas.
@article{ren2025empirical,
title={Empirical Hardness in Multi-Agent Pathfinding: Research Challenges and Opportunities},
author={Ren, Jingyao and Ewing, Eric and Kumar, TK and Koenig, Sven and Ayanian, Nora},
journal={Proceedings of the 24th International Conference on Autonomous Agents and Multiagent Systems},
year={2025}
}
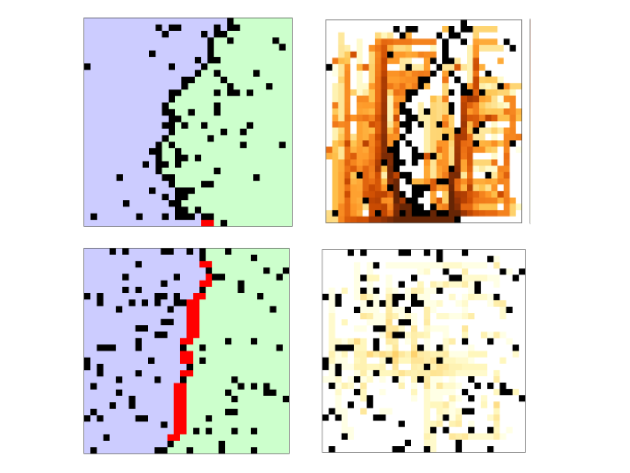
Map Connectivity and Empirical Hardness of Grid-Based Multi-Agent Pathfinding Problem
We present an empirical study of the relationship between map connectivity and the empirical hardness of the multi-agent pathfinding (MAPF) problem. By analyzing the second smallest eigenvalue (commonly known as lambda2) of the normalized Laplacian matrix of different maps, our initial study indicates that maps with smaller lambda2 tend to create more challenging instances when agents are generated uniformly randomly. Additionally, we introduce a map generator based on Quality Diversity (QD) that is capable of producing maps with specified lambda2 ranges, offering a possible way for generating challenging MAPF instances. Despite the absence of a strict monotonic correlation with lambda2 and the empirical hardness of MAPF, this study serves as a valuable initial investigation for gaining a deeper understanding of what makes a MAPF instance hard to solve.
@inproceedings{ren2024map,
title={Map connectivity and empirical hardness of grid-based multi-agent pathfinding problem},
author={Ren, Jingyao and Ewing, Eric and Kumar, TK Satish and Koenig, Sven and Ayanian, Nora},
booktitle={Proceedings of the 34th International Conference on Automated Planning and Scheduling},
volume={34},
pages={484--488},
year={2024}
}
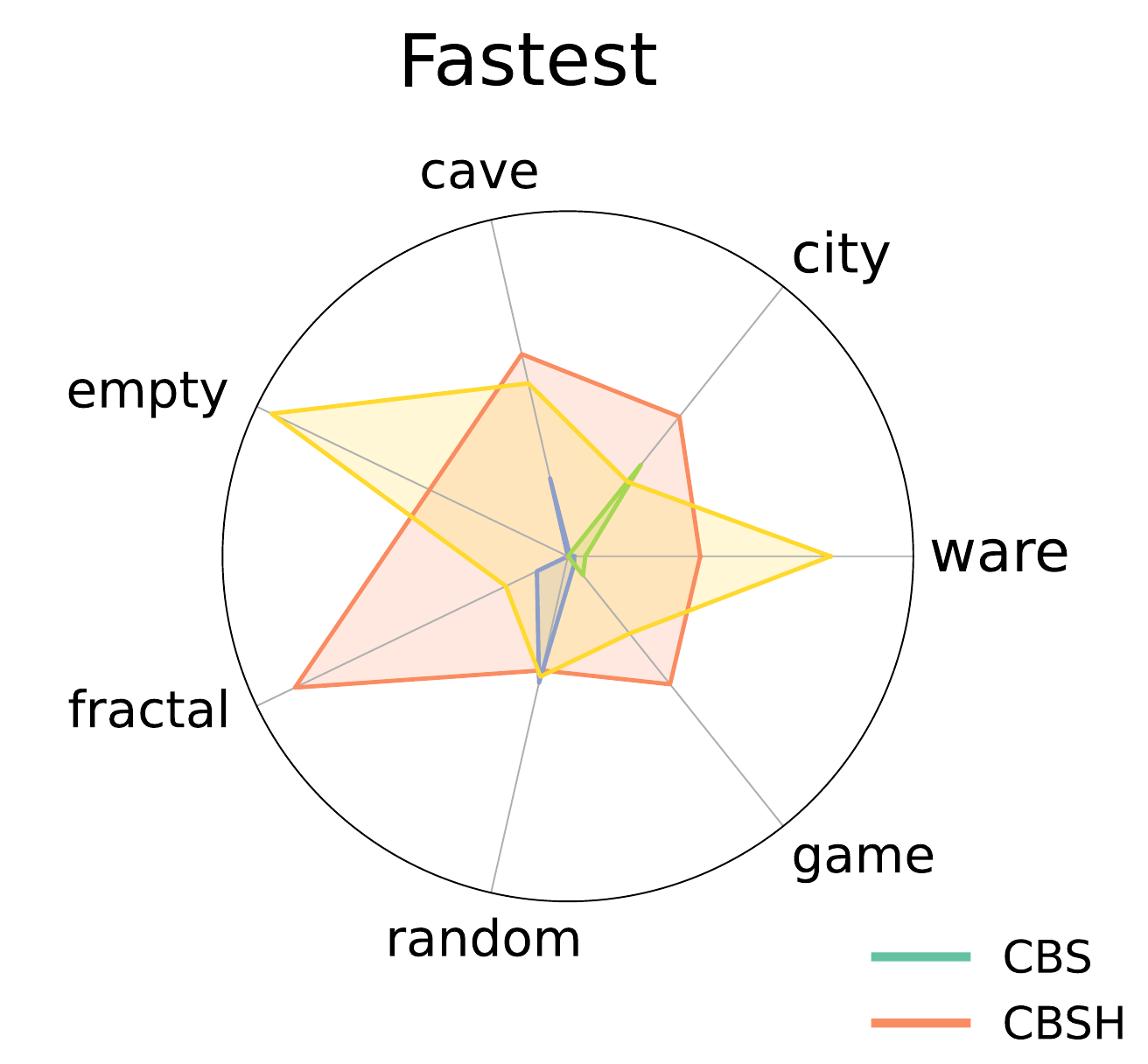
Betweenness Centrality in Multi-Agent Path Finding
Multi-Agent Path Finding (MAPF) is a well studied problem with many existing optimal algorithms capable of solving a wide variety of instances, each with its own strengths and weaknesses. While for some instances the fastest algorithm can be easily determined, not enough is known about their performance to predict the fastest algorithm for every MAPF instance, or what makes some instances more difficult than others. There is no clear answer for which features dominate the hardness of MAPF instances. In this work, we study how betweenness centrality affects the empirical difficulty of MAPF instances. To that end, we benchmark the largest and most complete optimal MAPF algorithm portfolio to date. We analyze the algorithms’ performance independently and as part of the portfolio, and discuss how betweenness centrality can be used to improve estimations of algorithm performance on a given instance of MAPF.
@inproceedings{ewing2022betweenness,
title={Betweenness centrality in multi-agent path finding},
author={Ewing, Eric and Ren, Jingyao and Kansara, Dhvani and Sathiyanarayanan, Vikraman and Ayanian, Nora},
booktitle={Proceedings of the 21th International Conference on Autonomous Agents and Multiagent Systems},
year={2022}
}
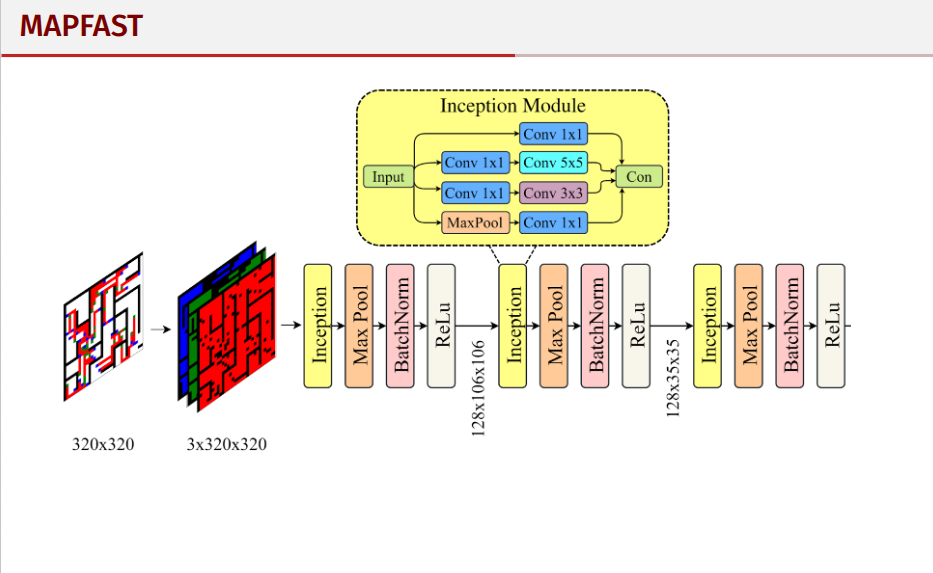
MAPFAST: A Deep Algorithm Selector for Multi-Agent Path Finding Using Shortest Path Embeddings
Solving the Multi-Agent Path Finding (MAPF) problem optimally is known to be NP-Hard for both make-span and total arrival time minimization. While many algorithms have been developed to solve MAPF problems, there is no dominating optimal MAPF algorithm that works well in all types of problems and no standard guidelines for when to use which algorithm. In this work, we develop the deep convolutional network MAPFAST (Multi-Agent Path Finding Algorithm SelecTor), which takes a MAPF problem instance and attempts to select the fastest algorithm to use from a portfolio of algorithms. We improve the performance of our model by including single-agent shortest paths in the instance embedding given to our model and by utilizing supplemental loss functions in addition to a classification loss. We evaluate our model on a large and diverse dataset of MAPF instances, showing that it outperforms all individual algorithms in its portfolio as well as the state-of-the-art optimal MAPF algorithm selector. We also provide an analysis of algorithm behavior in our dataset to gain a deeper understanding of optimal MAPF algorithms' strengths and weaknesses to help other researchers leverage different heuristics in algorithm designs.
@inproceedings{ren2021mapfast,
title={MAPFAST: A Deep Algorithm Selector for Multi Agent Path Finding using Shortest Path Embeddings},
author={Ren, Jingyao and Sathiyanarayanan, Vikraman and Ewing, Eric and Senbaslar, Baskin and Ayanian, Nora},
booktitle={Proceedings of the 20th International Conference on Autonomous Agents and Multiagent Systems},
volume={34},
pages={1055-1063},
year={2021}
}